
实用教程共16篇
把平时使用到的操作步骤或经验整理成教程,以待不时只需。
排序

systemctl 常用命令
1. 服务生命周期管理 命令说明示例sudo systemctl start <服务名>启动服务sudo systemctl start rosbag_docker.servicesudo systemctl stop <服务名>停止服务sudo systemctl st...
查看 USB 设备是否异常断开
✅ 一、查看 USB 设备是否正常识别1. 使用 lsusb查看 USB 设备列表lsusb在输出中查找你的 USB 设备,通常会显示厂商信息,比如:Bus 001 Device 005: ID 0d8c:0014 C-Media Electronic...
SSH远程连接不上常见错误
SSH 主机密钥和系统保存的不一样 报错如下: @@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ @ WARNING: REMOTE HOST IDENTIFICATION HAS CHANGED! @ @@@@@@@@@@@@@@@@@@@@@@@@@...
Ubuntu DHCP 服务器配置指南 (使用 isc-dhcp-server)
1. 安装 ISC DHCP 服务器 sudo apt update sudo apt install isc-dhcp-server -y 2. 配置 DHCP 服务器 主配置文件 /etc/dhcp/dhcpd.conf sudo nano /etc/dhcp/dhcpd.conf 基本配置示例: #...
解决AGX重启之后eth0和eth1对应的网卡会变,导致网络不能正常用问题
问题 发现有极少数的AGX再重启之后会出现网卡的加载顺序会变,导致eth0和eth1所对应的网卡变了,相应的配置文件就不起效了。 解决 1. 我们知道网卡的MAC地址是永远不变的,因此可以根据MAC地址...
ROS Launch读取环境变量作为参数
如下所示: 当ROS launch文件启动时,系统会自动检查当前环境中是否存在名为 ROBOT_VERSION 的环境变量 无需手动调用: 不需要在代码中显式调用 getenv() 或类似函数,ROS launch系统会自动...
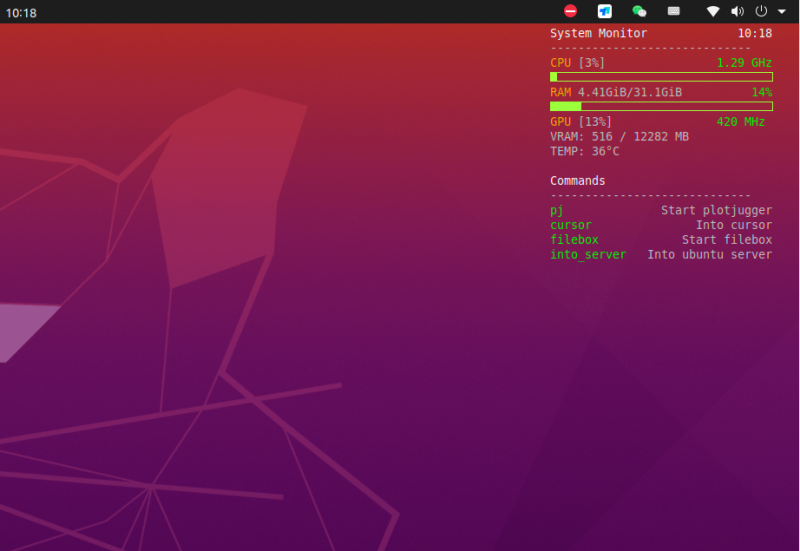
Ubuntu桌面可视化显示GUP、CPU、自定义等信息
本文使用conky工具实现该功能!!!安装conkysudo apt-get install conky创建并写入.conkyrc文件打开并创建.conkyrc文件vim ~/.conkyrc写入内容如下:conky.config = { -- Basic settings updat...
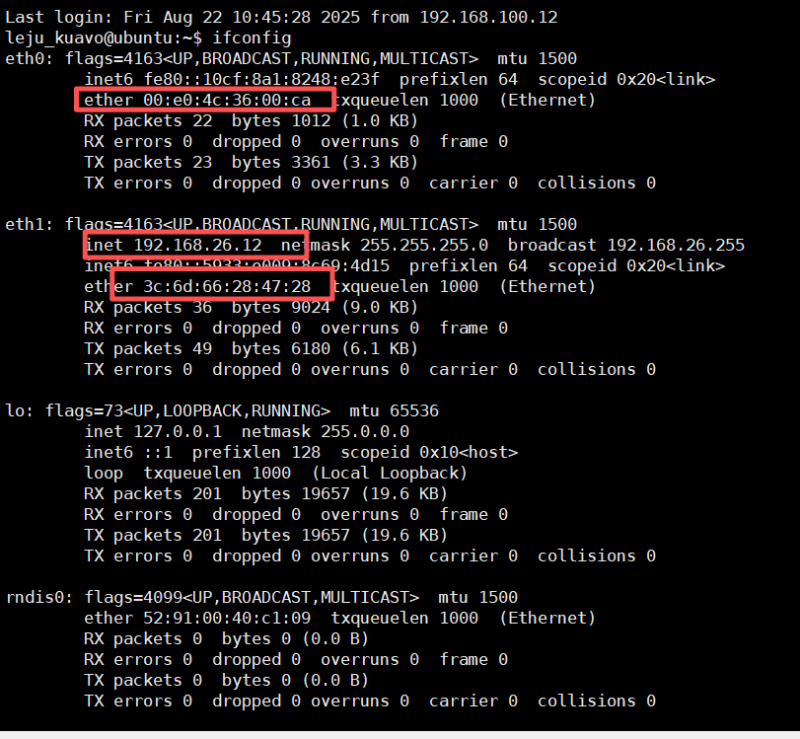
解决Ubuntu中因网卡加载顺序变化导致的网络配置互换
Ubuntu两个网卡发生名字互换 如下图所示,有时候重启Ubuntu会出现两个网卡的名字互换,eth0和eth1对调,但是对应的mac地址是不变的。 在配置文件中绑定MAC地址 每个网卡的MAC地址是在出厂时配好...
![Ubuntu 20.04 CUDA&cuDNN安装方法[通俗易懂]九桑-桑榆非晚,东隅已逝九桑](https://www.jiusang.com/wp-content/uploads/2025/08/图片-2-800x497.png)
Ubuntu 20.04 CUDA&cuDNN安装方法[通俗易懂]
CUDA安装下载cuda输入nvidia-smi命令查看支持的cuda版本如果无法查看,则说明尚未安装nvidia驱动,点击附加驱动,选择对应版本的驱动即可自动下载。从https://developer.nvidia.com/cuda-toolki...
Ubuntu配置开机自启服务
1. 完整的Python程序首先,创建一个完整的Python程序,用于检测键盘输入1/2/3并启动对应程序:#!/usr/bin/env python3 import subprocess import sys import tty import termios from systemd i...