
实用教程 第2页
把平时使用到的操作步骤或经验整理成教程,以待不时只需。
排序

主从机配置说明
1.基础概念 环境变量 作用 ROS_MASTER_URI 指定 roscore主机的地址(所有机器必须指向同一台主机) ROS_HOSTNAME 声明本机的域名(优先使用) ROS_IP 声明本机的 IP 地址(如果 ROS_HOSTNAME不...
Ubuntu中对脚本或可执行文件等创建终端指令
在Linux系统中,你可以通过以下几种方式将一个可执行文件链接为可以直接在终端运行的指令: 方法1:创建符号链接到系统PATH目录 首先确认你的可执行文件有执行权限: chmod +x /path/to/your/ex...
Ubuntu常见手动配置网络方法
在 Ubuntu 系统中,可以通过多种方式配置网络(IP 地址、网关、DNS 等),具体取决于系统版本和使用的网络管理工具。以下是三种主要的配置方式及其适用场景: 切记!!! 需要修改网络前切记请...
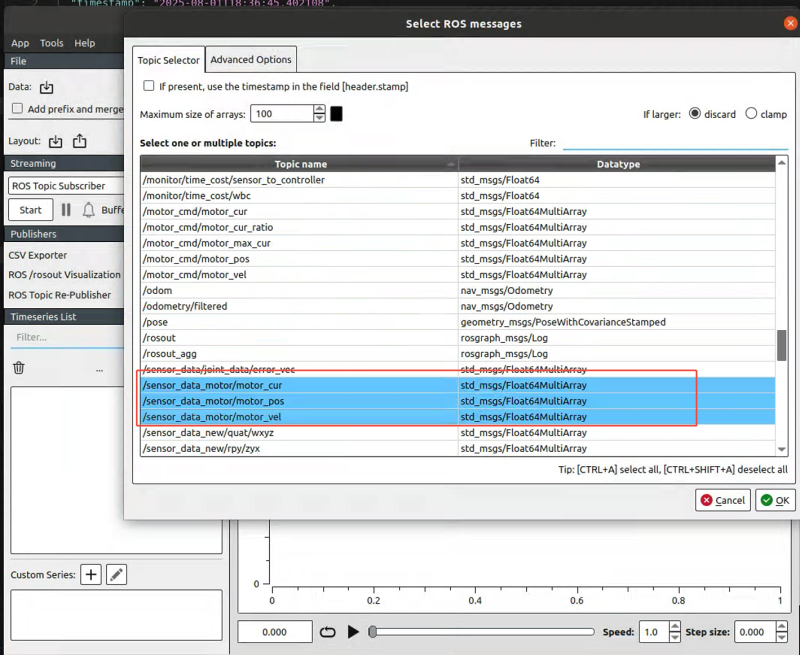
ROS的Bag切片以及Bag转csv
bag切片使用plotjuggler软件打开要切片的bag,选择需要切片的话题拖动进度条到要录制的时间,点击播放进行,终端手动录制需要切片话题的bag终端手动录制需要切片话题的bagrosbag record -O your...
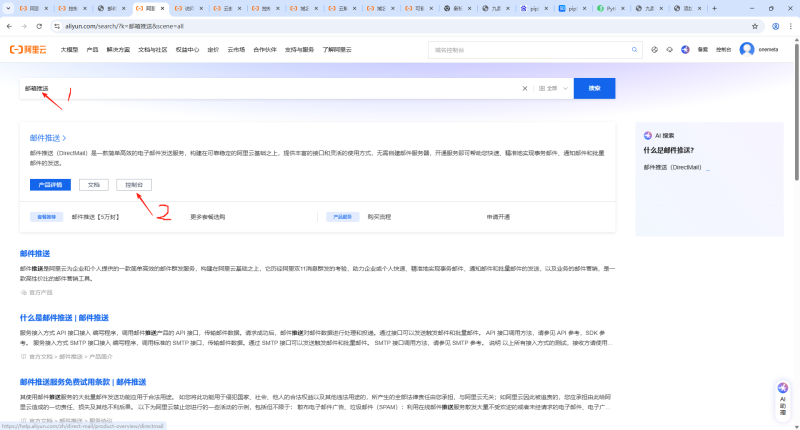
阿里云邮箱推送API使用
本文只介绍Python的SDK 搜索邮箱推送,进入控制台 安装操作引导进行操作 找到到SKD文档,翻到最后面创建AccessKey 安装SDK库 pip install aliyun-python-sdk-core SDK代码案例 # -*- coding:utf...
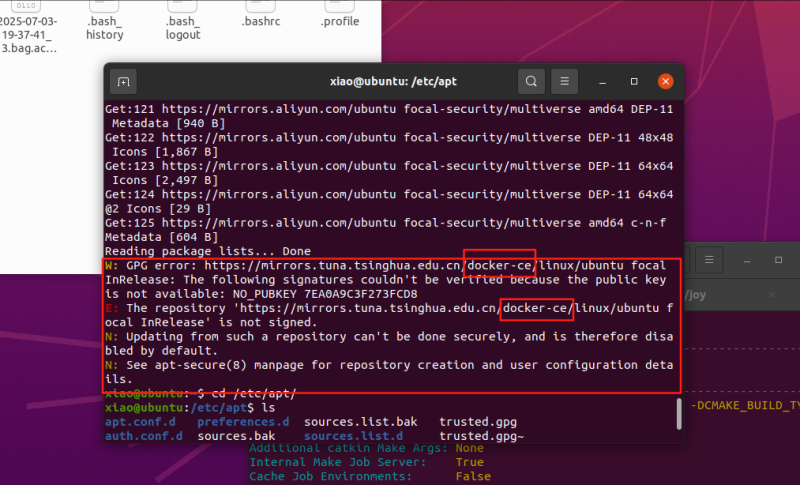
Docker 公钥仍然存在问题Docker密钥(暂时未解决)
步骤1:添加缺失的公钥我们可以使用以下命令将缺失的公钥添加到系统中(注意替换最后的密钥ID):sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 7EA0A9C3F273FCD8 然而,在较...