

bag切片
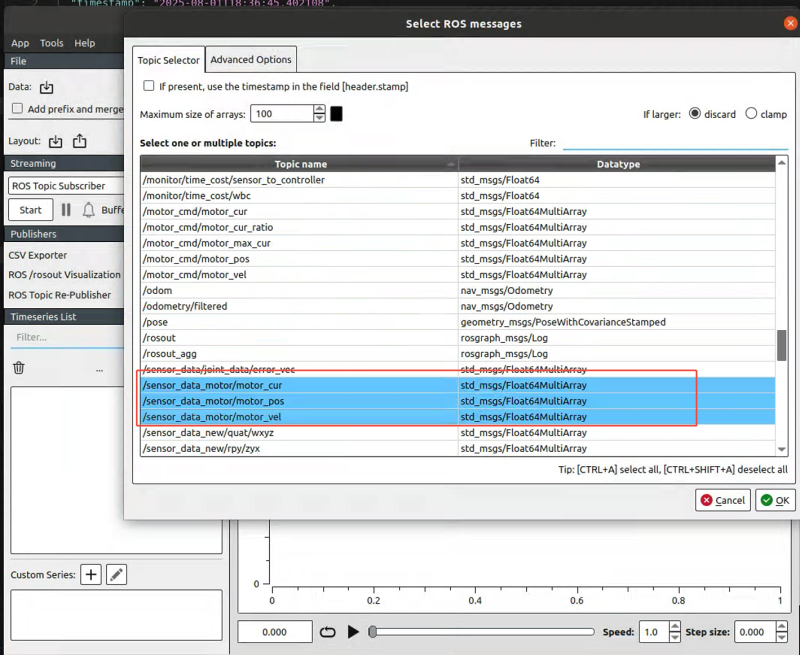
使用plotjuggler软件打开要切片的bag,选择需要切片的话题
![图片[1]九桑-桑榆非晚,东隅已逝ROS的Bag切片以及Bag转csv九桑-桑榆非晚,东隅已逝九桑](https://www.jiusang.com/wp-content/uploads/2025/08/image-1024x838.png)
拖动进度条到要录制的时间,点击播放进行,终端手动录制需要切片话题的bag
![图片[2]九桑-桑榆非晚,东隅已逝ROS的Bag切片以及Bag转csv九桑-桑榆非晚,东隅已逝九桑](https://www.jiusang.com/wp-content/uploads/2025/08/image-1-1024x839.png)
终端手动录制需要切片话题的bag
rosbag record -O your_name.bag /sensor_data_motor/motor_pos /sensor_data_motor/motor_vel /sensor_data_motor/motor_currosbag record -O your_name.bag 话题1 话题2 话题3 …… 话题n
bag转csv
说明:转换bag中的所有话题到csv,会创建一个同名文件夹,里面放着每个话题的csv
1.使用python代码来实现
#!/usr/bin/python3
import rosbag
import sys
import csv
import time
import os
import shutil
def main():
# Verify correct input arguments: 1 or 2
if len(sys.argv) > 2:
print("invalid number of arguments: " + str(len(sys.argv)))
print("should be 2: 'bag2csv.py' and 'bagName'")
print("or just 1 : 'bag2csv.py'")
sys.exit(1)
elif len(sys.argv) == 2:
listOfBagFiles = [sys.argv[1]]
numberOfFiles = "1"
print("reading only 1 bagfile: " + str(listOfBagFiles[0]))
else:
listOfBagFiles = [f for f in os.listdir(".") if f.endswith(".bag")]
numberOfFiles = str(len(listOfBagFiles))
print("reading all " + numberOfFiles + " bagfiles in current directory: \n")
for f in listOfBagFiles:
print(f)
print("\n press ctrl+c in the next 10 seconds to cancel \n")
time.sleep(10)
count = 0
for bagFile in listOfBagFiles:
count += 1
print("reading file " + str(count) + " of " + numberOfFiles + ": " + bagFile)
try:
# Access bag
bag = rosbag.Bag(bagFile)
bagContents = bag.read_messages()
bagName = bag.filename
# Create a new directory
folder = bagName.rstrip(".bag")
try:
os.makedirs(folder, exist_ok=True)
except OSError:
pass
shutil.copyfile(bagName, os.path.join(folder, bagName))
# Get list of topics from the bag
listOfTopics = []
for topic, msg, t in bagContents:
if topic not in listOfTopics:
listOfTopics.append(topic)
for topicName in listOfTopics:
# Create a new CSV file for each topic
safe_topic_name = topicName.replace('/', '_slash_')
filename = os.path.join(folder, safe_topic_name + '.csv')
with open(filename, 'w+', newline='') as csvfile:
filewriter = csv.writer(csvfile, delimiter=',')
firstIteration = True # allows header row
for subtopic, msg, t in bag.read_messages(topicName):
# Parse data from this instant
msgString = str(msg)
msgList = msgString.split('\n')
instantaneousListOfData = []
for nameValuePair in msgList:
splitPair = nameValuePair.split(':')
splitPair = [item.strip() for item in splitPair]
if len(splitPair) > 1:
instantaneousListOfData.append(splitPair)
# Write the first row from the first element of each pair
if firstIteration: # header
headers = ["rosbagTimestamp"] # first column header
for pair in instantaneousListOfData:
headers.append(pair[0])
filewriter.writerow(headers)
firstIteration = False
# Write the value from each pair to the file
values = [str(t)] # first column will have rosbag timestamp
for pair in instantaneousListOfData:
if len(pair) > 1:
values.append(pair[1])
filewriter.writerow(values)
except Exception as e:
print("Error processing {}: {}".format(bagFile, str(e)))
finally:
bag.close()
print("Done reading all " + numberOfFiles + " bag files.")
if __name__ == '__main__':
main()2. 运行说明:
python3 your_name.py your_name.bag© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END

暂无评论内容