


1.基础概念
| 环境变量 | 作用 |
| ROS_MASTER_URI | 指定 roscore主机的地址(所有机器必须指向同一台主机) |
| ROS_HOSTNAME | 声明本机的域名(优先使用) |
| ROS_IP | 声明本机的 IP 地址(如果 ROS_HOSTNAME不可用则使用) |
DHCP主机和ROS主从机的主机是两个概念,请注意区分,不要理解为是一样的。
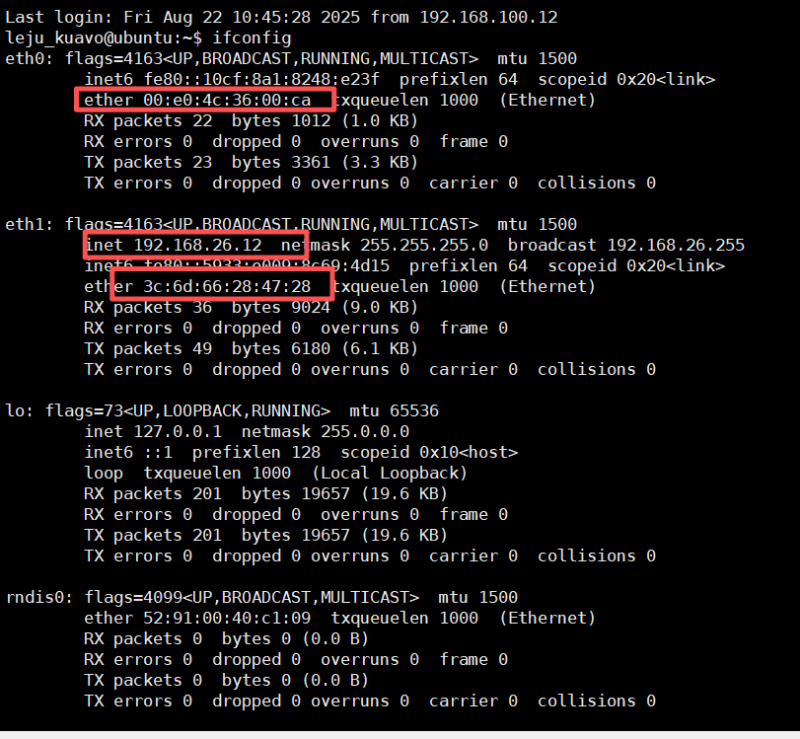
主从机的配置应该与DHCP区分开来,DHCP只与上位机通讯的IP有关系,所以往往上位机通讯有问题是因为DHCP配置的问题。DHCP主机的IP通常为192.168.26.1,DHCP从机的IP为自动分配,kuavo上为192.168.26.12。
即:DHCP只与下面配置步骤的第一步有关,所以往往DHCP的连通性很重要
2. 配置步骤
(1) 确认网络环境
-
所有计算机连接到 同一局域网(Wi-Fi/有线)。
-
检查各设备的 IP 地址:
-
ifconfig查看本机IP
ping <其他计算机IP># 测试连通性
(2) 配置主机(下位机)(运行 roscore的机器)
root用户下操作!!!
在 主机(下位机) 上操作:
-
打开.bashrc文件,写入以下代码(注意需要在root用户下面打开.bashrc)
export ROS_HOSTNAME=kuavo_master
export ROS_MASTER_URI=http://kuavo_master:11311
export ROS_IP=kuavo_master-
打开/etc/hosts文件,修改或写入以下代码
127.0.0.1 kuavo_master-
检测是否修改成功
-
重开终端进入root用户,或刷新.bashrc环境变量
-
在终端输入以下代码检查配置
echo $ROS_HOSTNAME # 应该打印:kuavo_master
echo $ROS_MASTER_URI # 应该打印:http://kuavo_master:11311
echo $ROS_IP # 应该打印:kuavo_master(3) 配置从机(上位机)
普通用户下操作!!!
在 主机(下位机) 上操作:
-
打开.bashrc文件,写入以下代码
export ROS_MASTER_URI=http://kuavo_master:11311
export ROS_IP=192.168.26.12 # 192.168.26.12为从机IP,自行修改-
打开/etc/hosts文件,修改或写入以下代码
192.168.26.1 kuavo_master # 192.168.26.1为主机(下位机)IP,自行修改-
检测是否修改成功
-
重开终端或者刷新.bashrc环境变量
-
在终端输入以下代码检查配置
echo $ROS_MASTER_URI # 应该打印:http://kuavo_master:11311
echo $ROS_IP # 应该打印:192.168.26.12 # 192.168.26.12为从机IP,自行修改© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
暂无评论内容