
实用教程共16篇
把平时使用到的操作步骤或经验整理成教程,以待不时只需。
排序
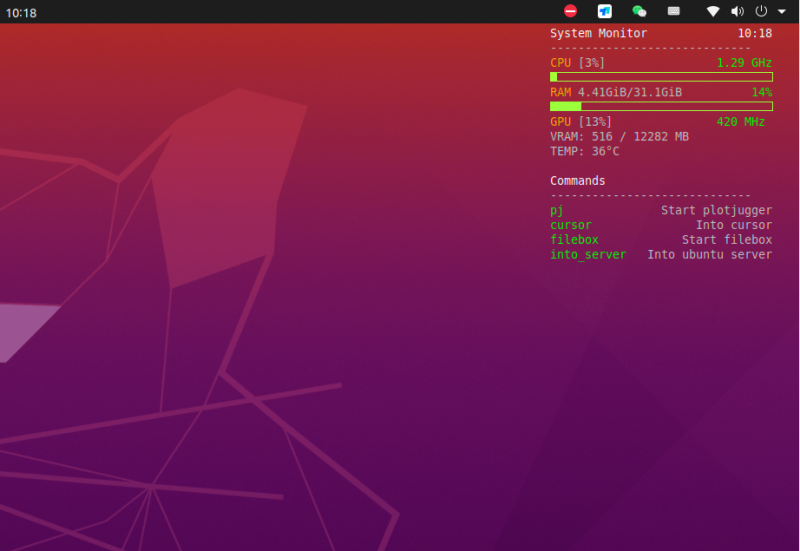
Ubuntu桌面可视化显示GUP、CPU、自定义等信息
本文使用conky工具实现该功能!!!安装conkysudo apt-get install conky创建并写入.conkyrc文件打开并创建.conkyrc文件vim ~/.conkyrc写入内容如下:conky.config = { -- Basic settings updat...
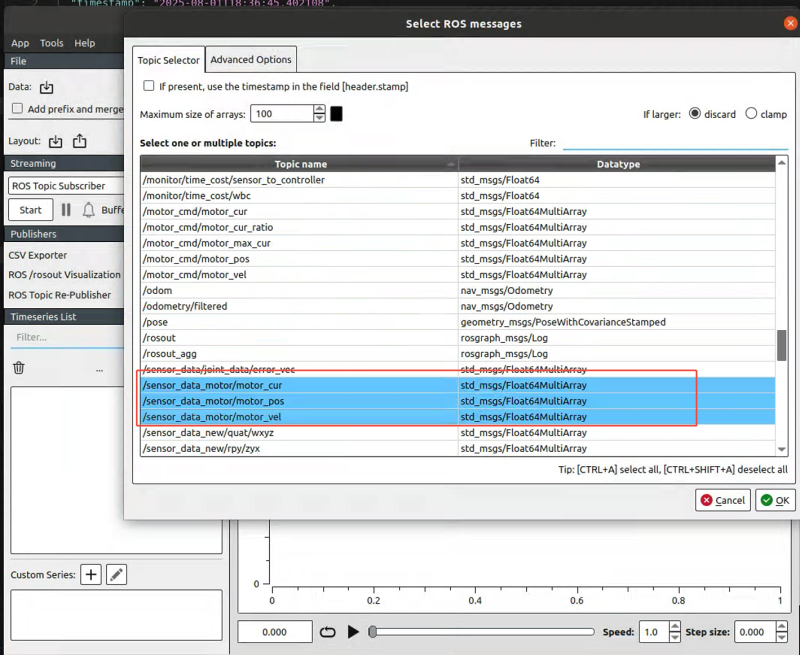
ROS的Bag切片以及Bag转csv
bag切片使用plotjuggler软件打开要切片的bag,选择需要切片的话题拖动进度条到要录制的时间,点击播放进行,终端手动录制需要切片话题的bag终端手动录制需要切片话题的bagrosbag record -O your...

Ubuntu中对脚本或可执行文件等创建终端指令
在Linux系统中,你可以通过以下几种方式将一个可执行文件链接为可以直接在终端运行的指令: 方法1:创建符号链接到系统PATH目录 首先确认你的可执行文件有执行权限: chmod +x /path/to/your/ex...
Ubuntu配置开机自启服务
1. 完整的Python程序首先,创建一个完整的Python程序,用于检测键盘输入1/2/3并启动对应程序:#!/usr/bin/env python3 import subprocess import sys import tty import termios from systemd i...
![Ubuntu 20.04 CUDA&cuDNN安装方法[通俗易懂]九桑-桑榆非晚,东隅已逝九桑](https://www.jiusang.com/wp-content/uploads/2025/08/图片-2-800x497.png)
Ubuntu 20.04 CUDA&cuDNN安装方法[通俗易懂]
CUDA安装下载cuda输入nvidia-smi命令查看支持的cuda版本如果无法查看,则说明尚未安装nvidia驱动,点击附加驱动,选择对应版本的驱动即可自动下载。从https://developer.nvidia.com/cuda-toolki...
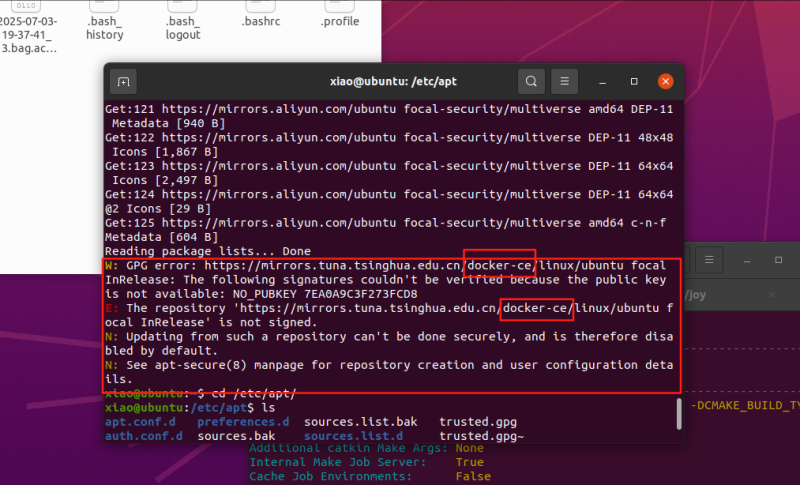
Docker 公钥仍然存在问题Docker密钥(暂时未解决)
步骤1:添加缺失的公钥我们可以使用以下命令将缺失的公钥添加到系统中(注意替换最后的密钥ID):sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 7EA0A9C3F273FCD8 然而,在较...
ROS Launch读取环境变量作为参数
如下所示: 当ROS launch文件启动时,系统会自动检查当前环境中是否存在名为 ROBOT_VERSION 的环境变量 无需手动调用: 不需要在代码中显式调用 getenv() 或类似函数,ROS launch系统会自动...
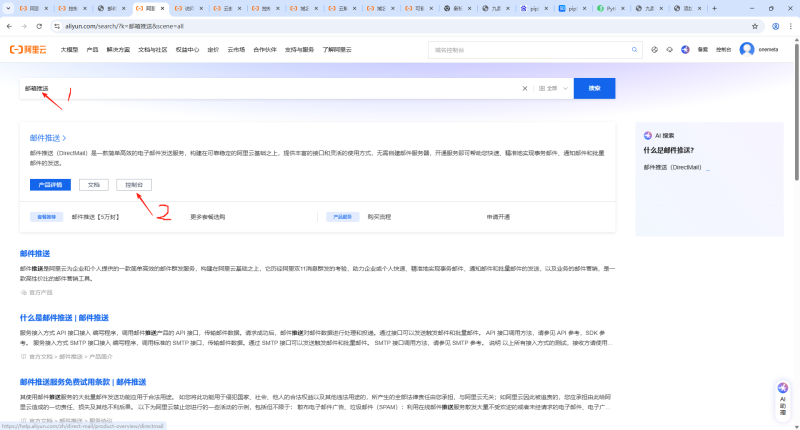
阿里云邮箱推送API使用
本文只介绍Python的SDK 搜索邮箱推送,进入控制台 安装操作引导进行操作 找到到SKD文档,翻到最后面创建AccessKey 安装SDK库 pip install aliyun-python-sdk-core SDK代码案例 # -*- coding:utf...
SSH远程连接不上常见错误
SSH 主机密钥和系统保存的不一样 报错如下: @@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@ @ WARNING: REMOTE HOST IDENTIFICATION HAS CHANGED! @ @@@@@@@@@@@@@@@@@@@@@@@@@...
Ubuntu DHCP 服务器配置指南 (使用 isc-dhcp-server)
1. 安装 ISC DHCP 服务器 sudo apt update sudo apt install isc-dhcp-server -y 2. 配置 DHCP 服务器 主配置文件 /etc/dhcp/dhcpd.conf sudo nano /etc/dhcp/dhcpd.conf 基本配置示例: #...