最新发布第2页
排序
![Ubuntu 20.04 CUDA&cuDNN安装方法[通俗易懂]-九桑](https://www.jiusang.com/wp-content/uploads/2025/08/图片-2-800x497.png)
Ubuntu 20.04 CUDA&cuDNN安装方法[通俗易懂]
CUDA安装下载cuda输入nvidia-smi命令查看支持的cuda版本如果无法查看,则说明尚未安装nvidia驱动,点击附加驱动,选择对应版本的驱动即可自动下载。从https://developer.nvidia.com/cuda-toolki...
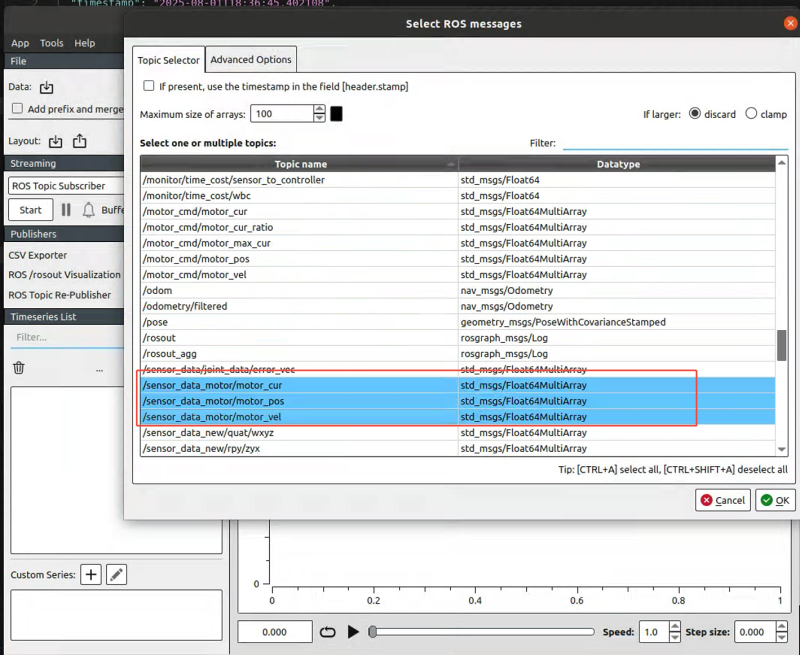
ROS的Bag切片以及Bag转csv
bag切片使用plotjuggler软件打开要切片的bag,选择需要切片的话题拖动进度条到要录制的时间,点击播放进行,终端手动录制需要切片话题的bag终端手动录制需要切片话题的bagrosbag record -O your...
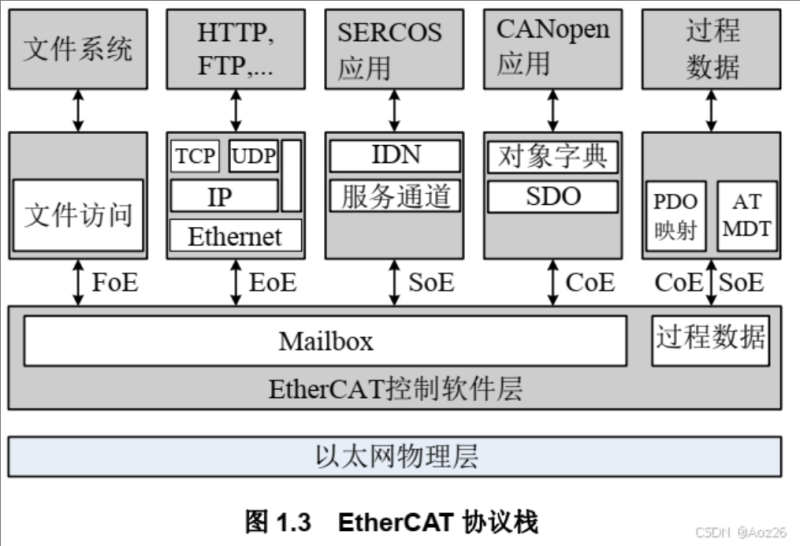
EtherCAT控制CAN电机的连接方式与通讯协议示例
概述 EtherCAT和CAN是两种不同的工业通信协议,要使用EtherCAT控制CAN电机,通常需要通过网关设备或特殊的主站实现协议转换。以下是实现方案和示例。 连接方式 方案1:EtherCAT主站 + CA...

解决AGX重启之后eth0和eth1对应的网卡会变,导致网络不能正常用问题
问题 发现有极少数的AGX再重启之后会出现网卡的加载顺序会变,导致eth0和eth1所对应的网卡变了,相应的配置文件就不起效了。 解决 1. 我们知道网卡的MAC地址是永远不变的,因此可以根据MAC地址...
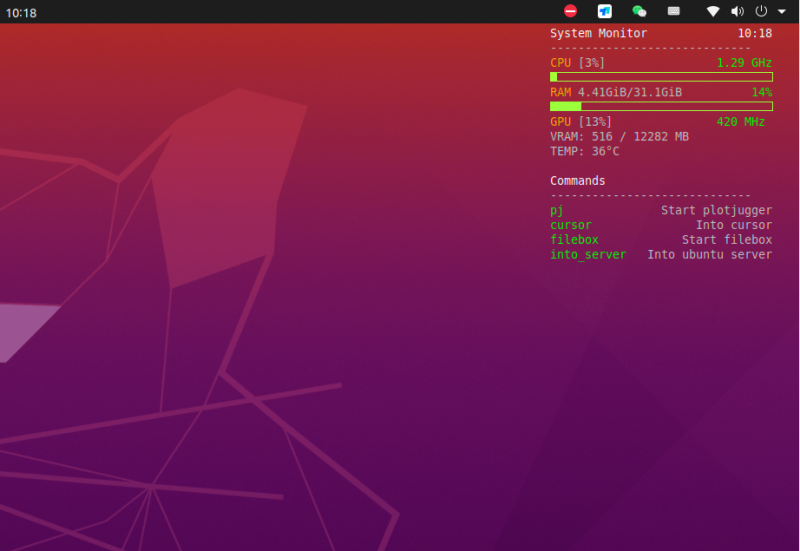
Ubuntu桌面可视化显示GUP、CPU、自定义等信息
本文使用conky工具实现该功能!!!安装conkysudo apt-get install conky创建并写入.conkyrc文件打开并创建.conkyrc文件vim ~/.conkyrc写入内容如下:conky.config = { -- Basic settings updat...

解决找不到/dev/atemsys
1. 安装模块sudo cp atemsys.ko /lib/modules/$(uname -r)/kernel/2. 生成依赖sudo depmod -a 3. 配置自动加载echo 'atemsys' | sudo tee /etc/modules-load.d/atemsys.conf4.验证sudo modprobe...
ROS Launch读取环境变量作为参数
如下所示: 当ROS launch文件启动时,系统会自动检查当前环境中是否存在名为 ROBOT_VERSION 的环境变量 无需手动调用: 不需要在代码中显式调用 getenv() 或类似函数,ROS launch系统会自动...
主从机配置说明
1.基础概念 环境变量 作用 ROS_MASTER_URI 指定 roscore主机的地址(所有机器必须指向同一台主机) ROS_HOSTNAME 声明本机的域名(优先使用) ROS_IP 声明本机的 IP 地址(如果 ROS_HOSTNAME不...
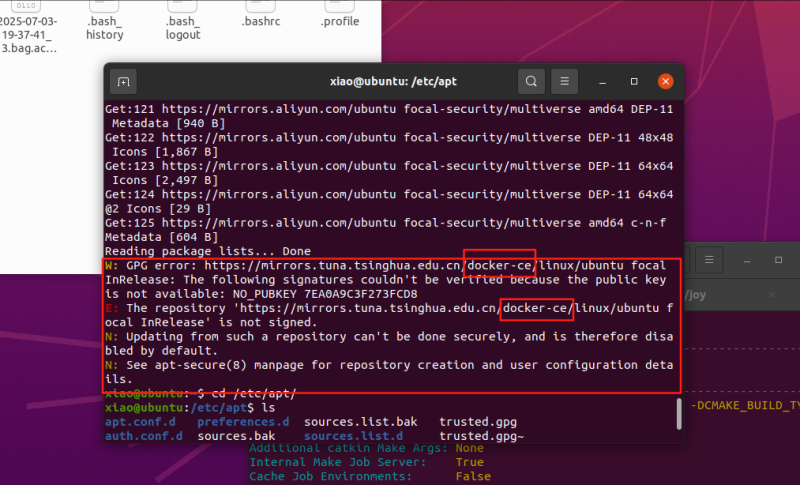
Docker 公钥仍然存在问题Docker密钥(暂时未解决)
步骤1:添加缺失的公钥我们可以使用以下命令将缺失的公钥添加到系统中(注意替换最后的密钥ID):sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 7EA0A9C3F273FCD8 然而,在较...