
概述
EtherCAT和CAN是两种不同的工业通信协议,要使用EtherCAT控制CAN电机,通常需要通过网关设备或特殊的主站实现协议转换。以下是实现方案和示例。
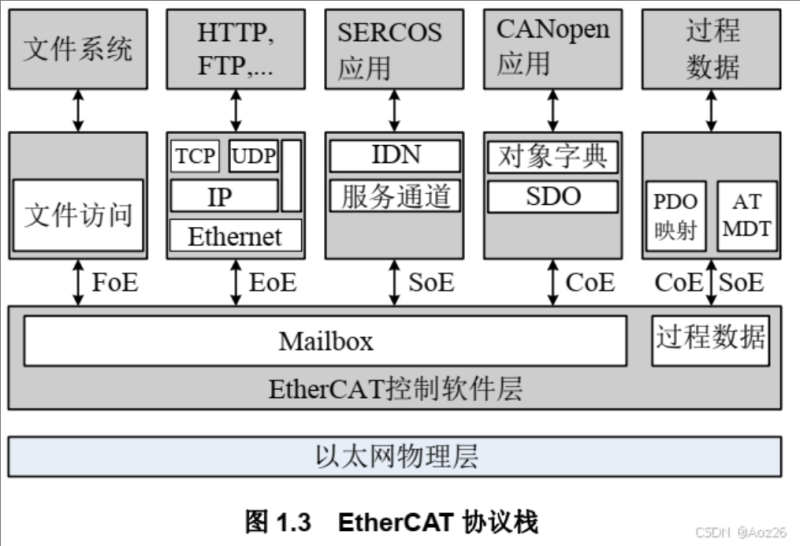
![图片[1]九桑-桑榆非晚,东隅已逝EtherCAT控制CAN电机的连接方式与通讯协议示例九桑-桑榆非晚,东隅已逝九桑](http://www.jiusang.com/wp-content/uploads/2025/07/image-3.png)
连接方式
方案1:EtherCAT主站 + CANopen网关
方案2:集成CAN接口的EtherCAT主站
通讯协议
EtherCAT主站通过CANopen over EtherCAT (CoE)协议与CAN电机通信。
示例代码 (基于TwinCAT)
PROGRAM MAIN
VAR
// 定义CANopen对象字典条目
ControlWord : WORD; // 6040h - 控制字
StatusWord : WORD; // 6041h - 状态字
TargetPosition : DINT; // 607Ah - 目标位置
ActualPosition : DINT; // 6064h - 实际位置
ModesOfOperation : BYTE; // 6060h - 运行模式
HomingMethod : BYTE; // 6098h - 回零方法
// 过程变量
bEnable : BOOL;
bStartHoming : BOOL;
bMoveAbsolute : BOOL;
nPosition : DINT;
END_VAR
METHOD ControlMotor : BOOL
VAR_INPUT
bEnable : BOOL;
nTargetPos : DINT;
END_VAR
VAR
bDone : BOOL := FALSE;
END_VAR
// 设置运行模式 (8=循环同步位置模式)
ModesOfOperation := 8;
// 控制字处理
IF bEnable THEN
// 启用序列: 6 -> 7 -> 15
IF (StatusWord AND 16#0040) = 0 THEN
ControlWord := 16#0006; // 准备启用
ELSIF (StatusWord AND 16#0040) <> 0 AND (StatusWord AND 16#0021) = 16#0021 THEN
ControlWord := 16#0007; // 启用操作
ELSE
ControlWord := 16#000F; // 操作启用
END_IF
// 设置目标位置
TargetPosition := nTargetPos;
// 检查是否到达目标位置
IF (StatusWord AND 16#0400) <> 0 THEN
bDone := TRUE;
END_IF;
ELSE
ControlWord := 16#0000; // 禁用电机
END_IF
ControlMotor := bDone;
END_METHOD
// 主程序
IF bEnable THEN
ControlMotor(bEnable, nPosition);
END_IF;
IF bStartHoming THEN
// 回零操作
ModesOfOperation := 6; // 回零模式
ControlWord := 16#001F; // 启动回零
END_IF;
IF bMoveAbsolute THEN
// 绝对位置移动
ModesOfOperation := 8; // 循环同步位置模式
ControlWord := 16#003F; // 启动移动
END_IF;配置步骤
硬件连接:
- 将EtherCAT主站与网关连接
- 网关通过CAN总线连接CAN电机
- 确保终端电阻正确配置
软件配置:
- 在EtherCAT主站软件中扫描网络
- 导入CAN电机的ESI (EtherCAT Slave Information)文件
- 配置PDO (过程数据对象)和SDO (服务数据对象)映射
对象字典配置:
- 配置标准CANopen对象如6040h(控制字)、6041h(状态字)
- 根据电机类型配置特定对象如607Ah(目标位置)
注意事项
- 确保EtherCAT和CAN网络的波特率匹配
- 检查CAN电机的节点ID是否唯一
- 实现正确的状态机转换(特别是控制字6040h的位序列)
- 对于实时性要求高的应用,优化EtherCAT周期时间
常见问题解决
- 通信失败:检查物理连接、终端电阻和波特率设置
- 电机不启动:验证控制字位序列是否正确
- 位置偏差:检查编码器配置和PDO映射
以上示例基于典型CANopen驱动器的控制方式,实际实现可能需要根据具体电机型号和制造商文档进行调整。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END



暂无评论内容