
软件共5篇
具身智能是赋予AI物理身体,使其通过传感器感知环境并自主决策行动的智能系统,实现“感知-思考-行动”闭环。
排序
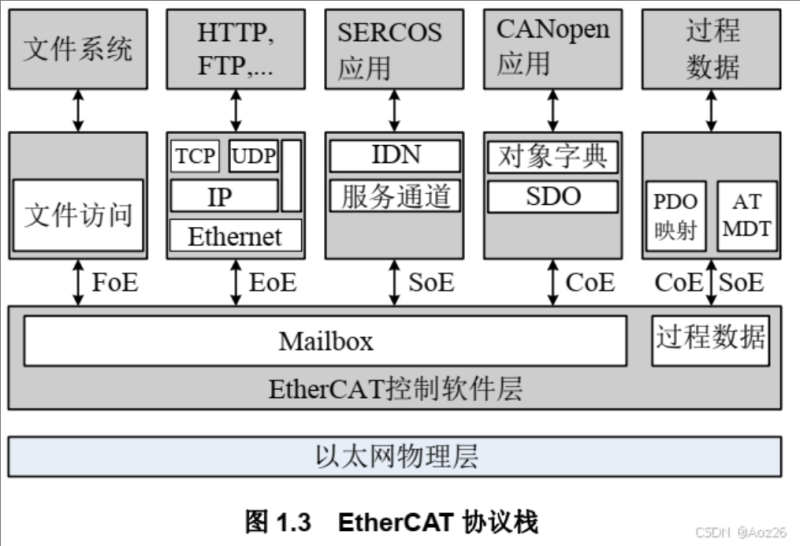
EtherCAT控制CAN电机的连接方式与通讯协议示例
概述 EtherCAT和CAN是两种不同的工业通信协议,要使用EtherCAT控制CAN电机,通常需要通过网关设备或特殊的主站实现协议转换。以下是实现方案和示例。 连接方式 方案1:EtherCAT主站 + CA...

ROS Launch读取环境变量作为参数
如下所示: 当ROS launch文件启动时,系统会自动检查当前环境中是否存在名为 ROBOT_VERSION 的环境变量 无需手动调用: 不需要在代码中显式调用 getenv() 或类似函数,ROS launch系统会自动...

Ubuntu 识别不到喇叭的 Udev 规则配置指南
Ubuntu 识别不到喇叭的 Udev 规则配置指南 当 Ubuntu 无法识别您的喇叭时,可以通过配置 Udev 规则来解决这个问题。以下是详细的解决步骤: 1. 首先检查音频设备状态 aplay -l 和 alsamixer 查...
解决找不到/dev/atemsys
1. 安装模块sudo cp atemsys.ko /lib/modules/$(uname -r)/kernel/2. 生成依赖sudo depmod -a 3. 配置自动加载echo 'atemsys' | sudo tee /etc/modules-load.d/atemsys.conf4.验证sudo modprobe...
解决AGX重启之后eth0和eth1对应的网卡会变,导致网络不能正常用问题
问题 发现有极少数的AGX再重启之后会出现网卡的加载顺序会变,导致eth0和eth1所对应的网卡变了,相应的配置文件就不起效了。 解决 1. 我们知道网卡的MAC地址是永远不变的,因此可以根据MAC地址...